
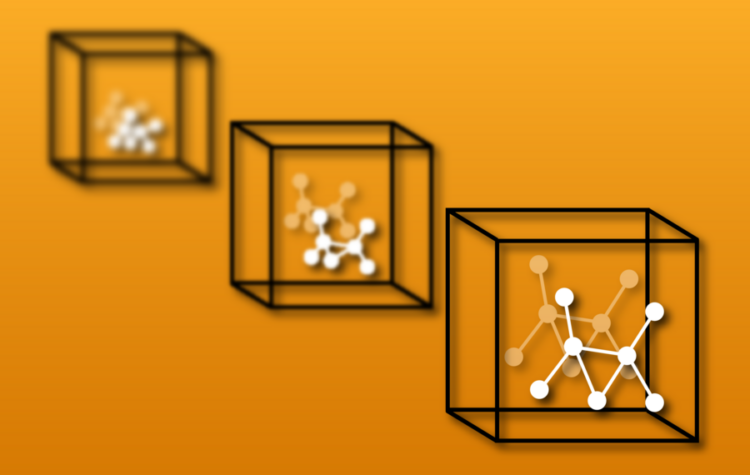
How AI is improving simulations with smarter sampling techniques
MIT CSAIL researchers created an AI-powered method for low-discrepancy sampling, which uniformly distributes data points to boost simulation accuracy.
Four Recipients Announced for new Transformative Research Funds
The department is pleased to announce the four inaugural recipients of the Transformative Research Fund, an exciting new funding opportunity designed to facilitate bold and pivotal research, especially that which applies recent breakthrough technologies (such as generative AI) to important problems with broad societal impact.
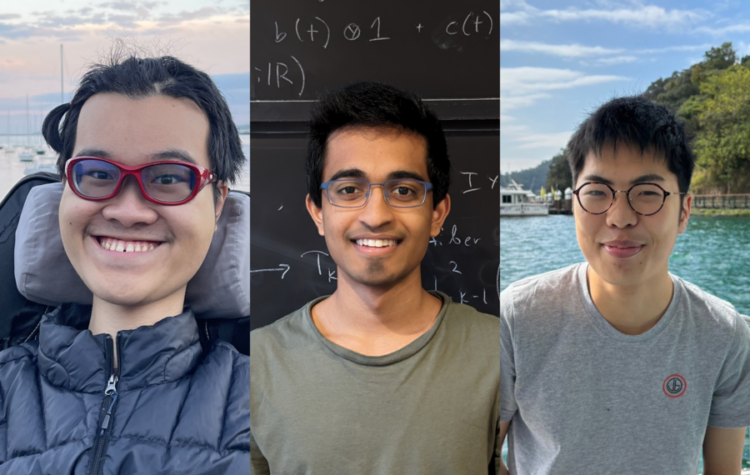
Three from MIT named 2024-25 Goldwater Scholars
Undergraduates Ben Lou, Srinath Mahankali, and Kenta Suzuki, whose research explores math and physics, are honored for their academic excellence.

“DribbleBot” can maneuver a soccer ball on landscapes such as sand, gravel, mud, and snow, using reinforcement learning to adapt to varying ball dynamics.

MIT engineers build a battery-free, wireless underwater camera
The device could help scientists explore unknown regions of the ocean, track pollution, or monitor the effects of climate change.
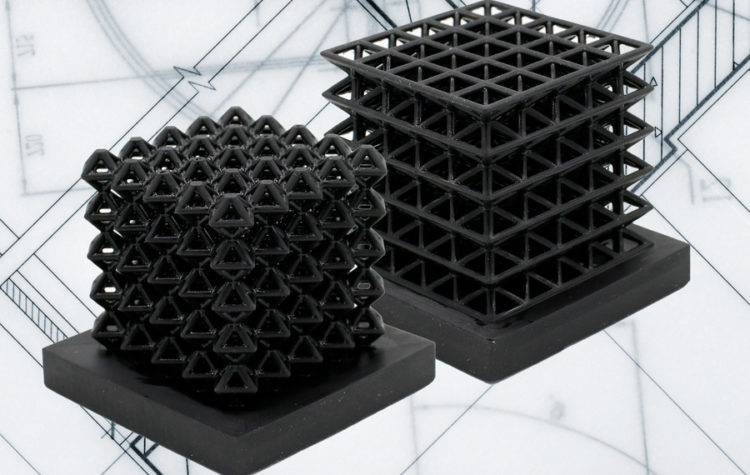
New programmable materials can sense their own movements
Engineers 3D print materials with networks of sensors directly incorporated.
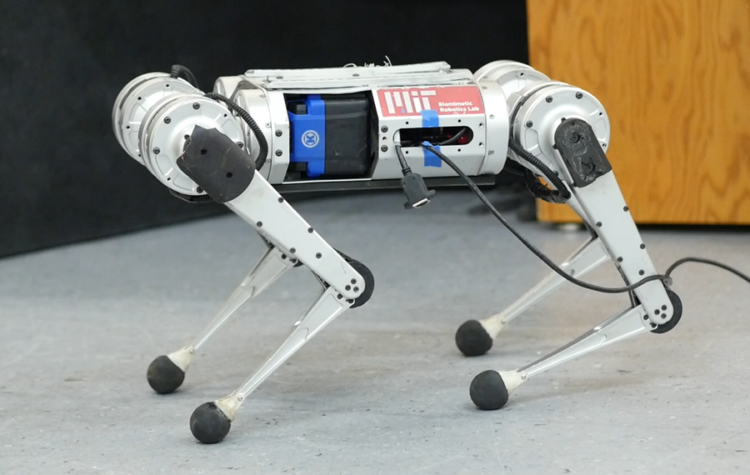
3 Questions: How the MIT mini cheetah learns to run
CSAIL scientists came up with a learning pipeline for the four-legged robot that learns to run entirely by trial and error in simulation.