
Selected:
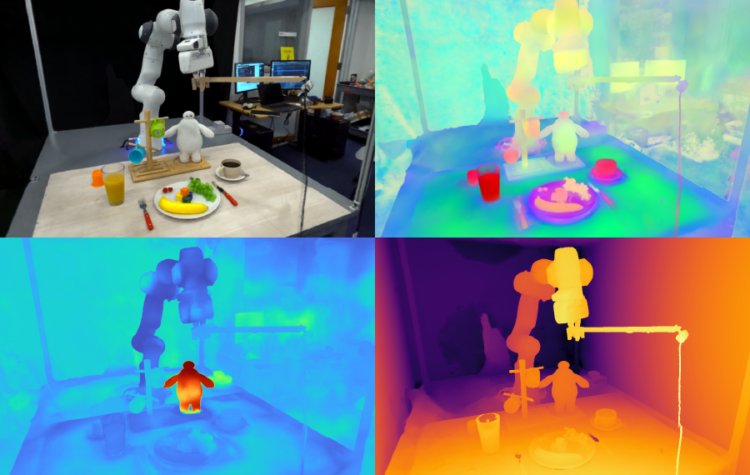
Using language to give robots a better grasp of an open-ended world
November 3, 2023
By blending 2D images with foundation models to build 3D feature fields, a new MIT method helps robots understand and manipulate nearby objects with open-ended language prompts.
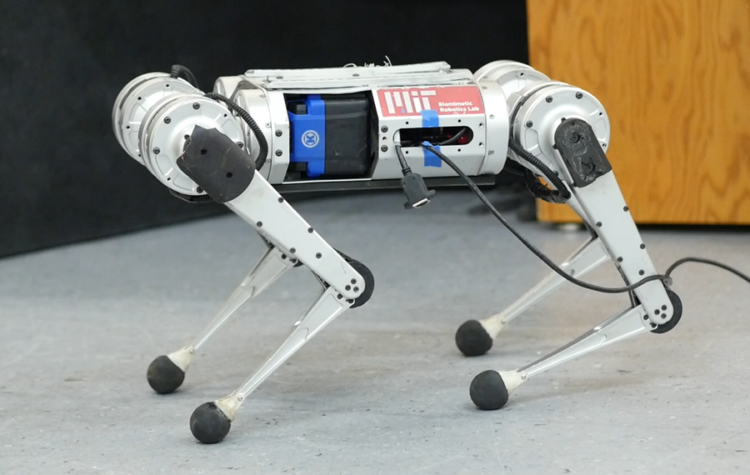
3 Questions: How the MIT mini cheetah learns to run
March 21, 2022
CSAIL scientists came up with a learning pipeline for the four-legged robot that learns to run entirely by trial and error in simulation.