
“SceneSmith” system uses collaborative AI agents to create realistic 3D environments of places like kitchens, hotels, and living rooms, where robots can simulate everyday chores.

Researchers combined an efficient algorithm with dedicated hardware to rapidly generate 3D maps for navigation using minimal memory and power.


The award is given annually to an outstanding contributor to education from among the faculty members who are being proposed for promotion to associate professor without tenure.
MIT CSAIL and LIDS researchers developed a mathematically grounded system that lets soft robots deform, adapt, and interact with people and objects, without violating safety limits.
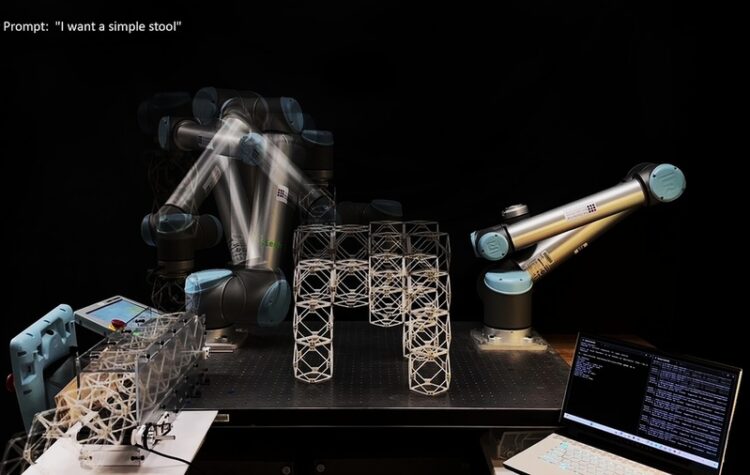
The speech-to-reality system combines 3D generative AI and robotic assembly to create objects on demand.

From robotics to apps like “NerdXing,” senior Julianna Schneider is building technologies to solve problems in her community.

Founded by MIT alumni, the Pickle Robot Company has developed machines that can autonomously load and unload trucks inside warehouses and logistic centers.

With insect-like speed and agility, the tiny robot could someday aid in search-and-rescue missions.

Agrawal received the award for his work in “robot learning, self-supervised and sim-to-real policy learning, agile locomotion, and dexterous manipulation,” according to the organization.